Shape Comparison and Gromov-Hausdorff Distance
Sushovan "Sush" MAJHI
Tulane University (January 21, 2020)
Scan the above QR or hit the following url: smajhi.com/gh-presentation
The Manifesto
- Introduction to Shape Comparison
- Hausdorff Distance
- Gromov-Hausdorff Distance
- Computing the Gromov-Hausdorff Distance
-
Questions ,Discussions , and 🍕Pizza .
Collaborators

Carola Wenk
Computer Science, Tulane

Jeffrey Vitter
Computer and Information Science, University of Mississippi
Motivation
circle
triangle

triangular

circular
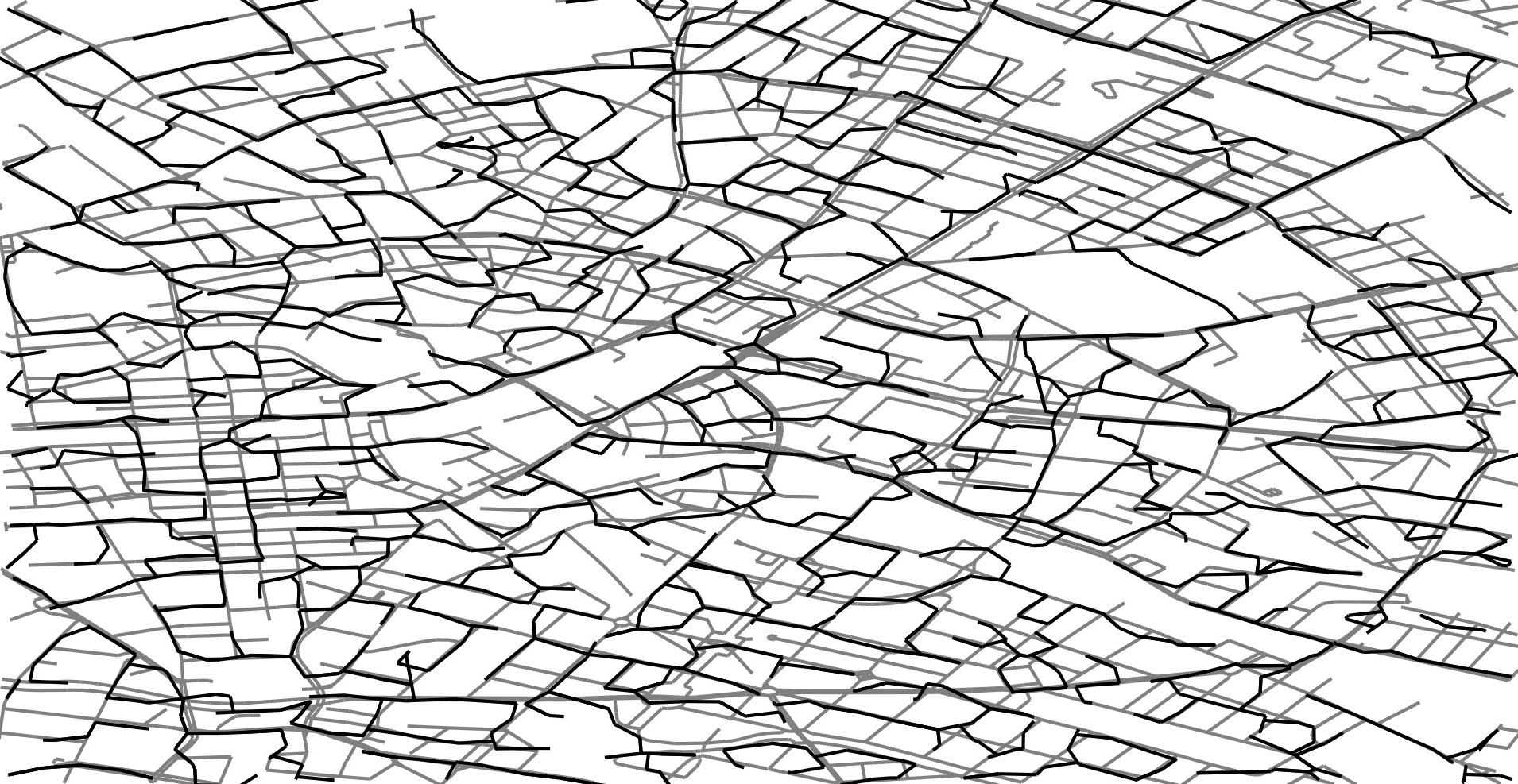
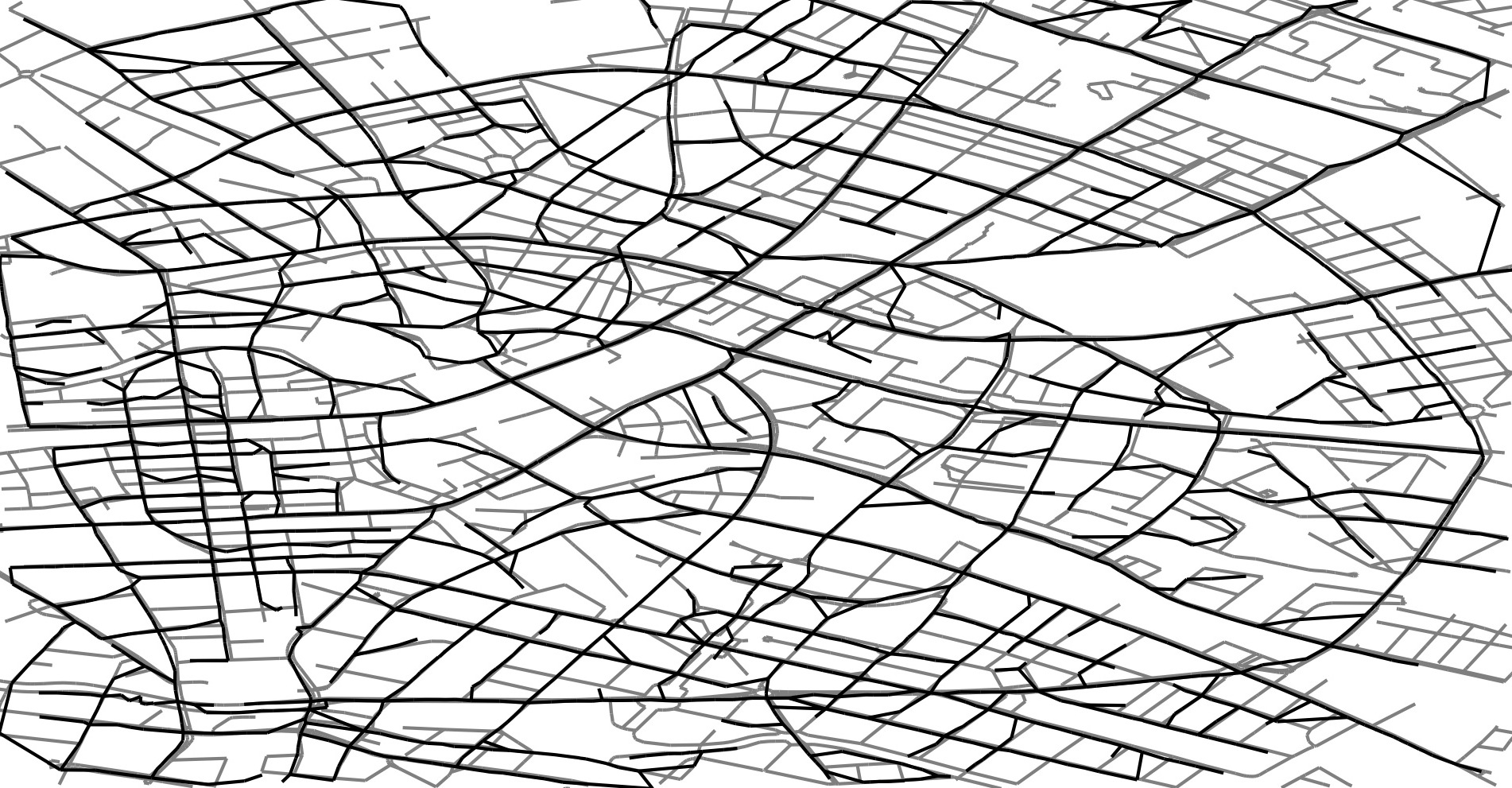
Map Construction from GPS data (Berlin)
https://mapconstruction.org
Shape Comparison
We need an appropriate notion of a distance measure $d_?(X,Y)$ so that
- $d_?(X,Y)$ defines a pseudo-metric on the class of metric spaces.
- $d_?(X,Y)$ large $\iff$ very different shape
- $d_?(X,Y)$ small $\iff$ $X=Y$ up to a class of deformation.
Hausdorff Distance
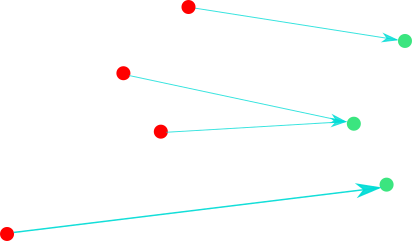
Nearest neighbor distance (red points $\to$ green points).
- $d^Z_H(X,Y)\geq0$,
- $d^Z_H(X,Y)=d^Z_H(Y,X)$,
- $d^Z_H(X,Y)=0\iff X=Y$, and
- $d^Z_H(A,C)\leq d^Z_H(A,B)+d^Z_H(B,C)$.
💡
$d_H$ is sensitive to Shape + Size + Placement.
Hausdorff under Isometry
$d_H($◤, ◢ $)=$ large.
- For $N=1$, $T$ is translation or reflection.
- For $N=2$, $T$ is rotation, translation or reflection.
💡
$d_{H,iso}$ is sensitive to Shape + Size +
$d_{H,iso}($◤, ◢ $)=0$.
Gromov-Hausdorff Distance
How to compare shapes that do not have a common embedding?
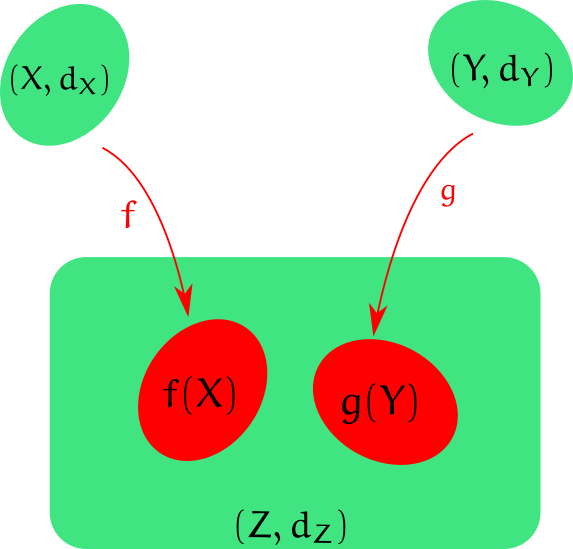
Isometric Embedding
$d_{GH}$ vs $d_{H,iso}$
Computing $d_{GH}$
💡
Computing an
💡
$d_{H,iso}$ approximates $d_{GH}$ with an approximate factor of $\left(1+\frac{1}{4}\right)$.
This Presentation
- The framework is called RevealJS
- Language: JavaScript
- Platform: (modern) Web Browsers
- Latex Support: MathJax
- Features: Multiplexing, Notes, Timer, Autoslide, and more.
QUESTIONS.